
Sound Bytes: Synchronous swimming (with robots); behind the Hawaiʻi Glider Challenge
“Sound Bytes” is a science blog written by scientists, researchers and associates of National Oceanic and Atmospheric Administration Fisheries. The following blog was written by Oregon State University Marine Mammal Institute research assistant professor Selene Fregosi.
I’ve been working with passive acoustic underwater gliders for more than 10 years — from early engineering tests to multi-week ocean surveys.
But National Oceanic and Atmospheric Administration Fisheries Hawaiʻi Glider Challenge was unlike anything I’ve done before.
Now that it’s wrapped up, I want to show you what the challenge looked like behind the scenes — how we “flew” underwater gliders, how we coordinated multiple teams and a bit of what we learned along the way.

How do you steer this thing anyway?
Glider operators are called pilots because we “fly” these vehicles underwater.
Buoyancy-driven gliders operate a bit like airplanes.
When an airplane speeds down a runway, its forward motion allows the wings to create lift, making it rise. Similarly, when we make the glider slightly heavier or lighter than the surrounding water, we can make it sink or rise.
Because it has wings, the up-and-down movement propels the glider in a zig-zag pattern, rather than a straight motion like an elevator.
Each glider has its own control system. That’s one reason we needed so many pilots for this challenge.
Each of us specializes in a different vehicle.
I know how to fly a Seaglider, and my colleague Tony Cossio from our Southwest Fisheries Science Center is a pro at flying Slocum gliders.
Pilot coordination during the Hawaiʻi Glider Challenge
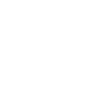
Every time a Seaglider reaches the surface, it calls home to a base station using a satellite connection.
First, it sends back basic health and data files with information such as how deep it dove, how fast it traveled and some safety checks for leaks, as well as raw temperature and salinity data. Then, the glider downloads a small text file with new instructions.
Those instructions tell the glider where to go, how deep to dive and what sensors to run, such as the temperature probe or passive acoustic recorder.
The information it sends back is processed into plots that I review on my computer, looking for patterns or warning signs. Each glider type has a slightly different base station and way to send and receive commands, but the theory is generally the same.
Piloting isn’t like driving in real time. I don’t steer with a joystick.
Instead, it works dive-by-dive.
I send commands to the glider. Then it dives. When the glider completes the commands and resurfaces, I review the data, adjust commands and the process repeats. We make piloting decisions and then wait about 6 hours to see the results.
Even though we aren’t glued to our computers 24/7, we have to be ready to “talk” to the gliders at any time.
During the challenge, my co-pilot Maria Visilkin from Cornell University and I took a short break during the weekend to watch a surfing competition and look for whales.
We brought our laptops and sat in the car so Maria could check on her gliders before we walked down to the beach.
Thanks to mobile hot spots and satellite communication, we can pilot from almost anywhere, though this also means you never fully relax — especially when your robot is alone in the middle of the Pacific Ocean.
Choreographing underwater moves
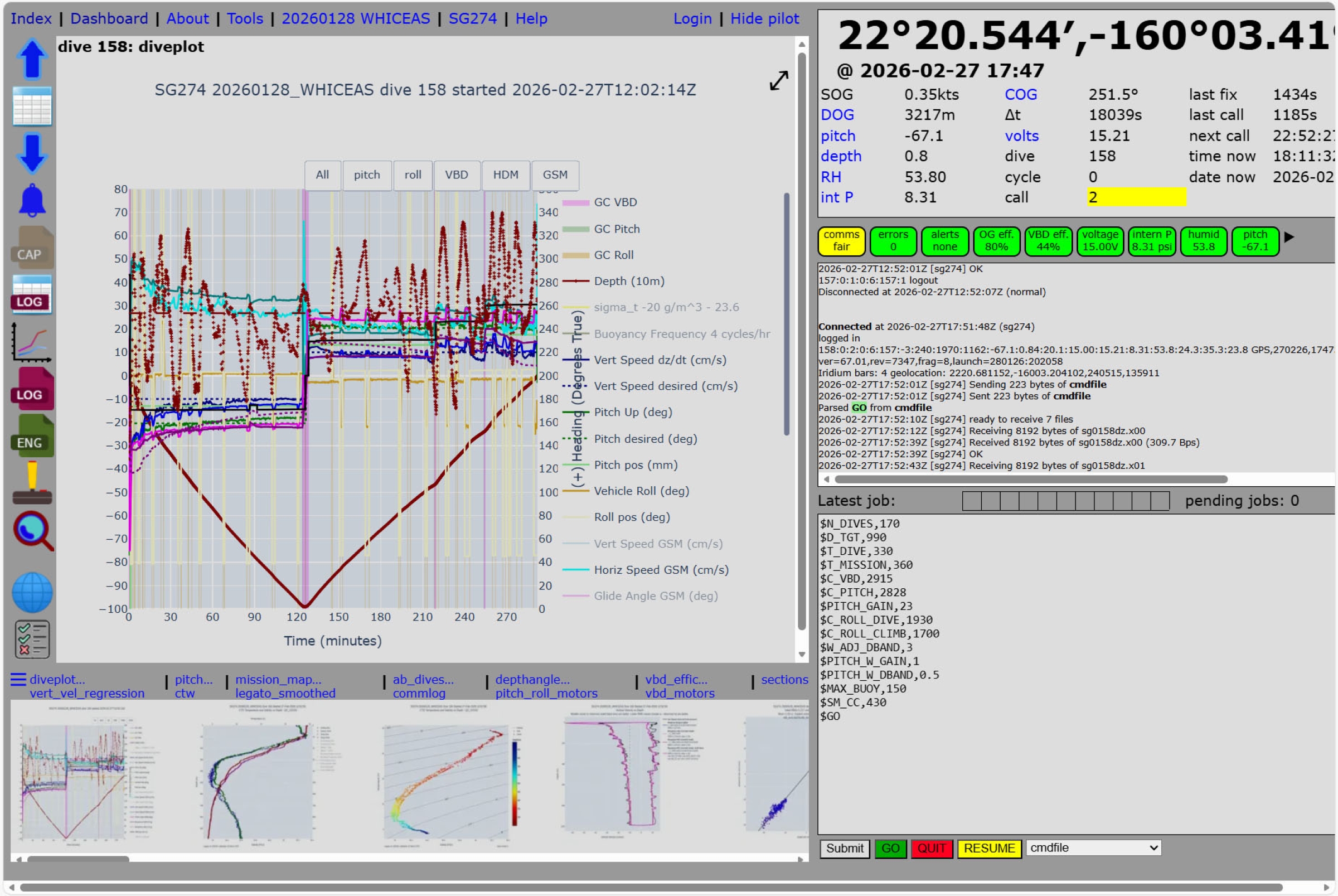
Coordinating multiple gliders to operate in the same place at roughly the same time made this challenge far more involved than a typical survey.
Pilots used cloud-based platforms and group texts to constantly update each other about glider positions and progress.
We quickly learned some gliders were faster than others, or better at moving against currents. For example, the SeaExplorer often reached destinations first.
It’ll be interesting to see if the data shows it had the highest track line coverage per day.

What we learned from the gliders
Now that most of the gliders are back on land — a few are on a new mission to listen for whales — we’re beginning months of data processing and analysis.
But we’ve already learned a few things.
Not all gliders handle the ocean the same way. Some were faster, some slower and some handled currents better.
I was especially interested in how differently each type can be controlled.
With a Seaglider, I set dive depth, duration and maximum thrust, and the glider calculates its pitch angle for efficient flight. Other gliders allow pilots to set pitch angle directly, or have other settings to change vertical speed.
I’m eager to see how those differences show up in the data.
I’m happy to report that we definitely recorded marine mammals! Some gliders sent back small images of sound recordings that showed dolphins, humpback whales and sperm whales.
It’s peak breeding season for humpbacks in Hawaiʻi, so we expect many hours of singing whales in the recordings.
Performing under pressure
This challenge was also a lesson in humility. Field work rarely goes exactly as planned.
We dealt with shipping delays for a tiny replacement microSD card, a flood and power outage at our glider lab and a winter storm that shut down the entire state of Hawaiʻi.
We revised our schedule multiple times to adjust for weather and differences in glider performance.
Ocean work requires careful planning and the willingness to adapt when things change — but it also means this kind of work is never boring!
Listen to a 30-second clip of humpback whale songs, dolphin whistles and sperm whale clicks recorded by the Alseamar SeaExplorer.
Selene Fregosi provides research support to National Oceanic and Atmospheric Administration Pacific Islands Fisheries Science Center through Cooperative Institute for Marine Ecosystem Resources Studies. Her research interests span all things bioacoustics, with a particular focus on passive acoustic monitoring of marine mammals using autonomous underwater gliders. Click here to read past “Sound Bytes.”
Sponsored Content


